
Hned na začátek je třeba uvést, že pro jednoduchost se budeme zabývat regulací na konstantní hodnotu – žádaná hodnota se v čase nemění.
Co je to ON /OFF regulace ?
Je to základní typ regulace – zapnuto / vypnuto , též dvoupolohová regulace.
Základními parametry jsou žádaná hodnota a hystereze.
Příklad interpretace On/Off regulace pro topení:
Žádaná hodnota: 60°C. Hystereze: (-) 2°C
Akční člen: topné těleso boileru
Topné těleso je zapnuté, pokud teplota nižší než 60°C, při 60°C se topení vypne.
Hystereze je vlastně necitlivost na změnu regulované veličiny. Obvykle pro topení leží pod žádanou hodnotou (proto se někdy udává znaménko mínus). Pokud teplota po čase klesne o hysterezi, tedy na 58°C, topení se opět zapne. Obrázek ukazuje závislost spínání topení na teplotě.

Teorie On/Off regulace
Typický průběh teploty při ON /OFF regulaci ukazuje následující obrázek

Typický průběh při On/Off regulaci
Co je PID regulace ?
PID regulace je jeden z nejpoužívanějších algoritmů pro přesné řízení regulované veličiny. Protože teoretické vysvětlení je složitější a je hojně popsáno v odborné literatuře, zaměříme se na velmi stručný popis principů a praktické dopady.
PID regulace využívá 3 principů:
- P – proporcionální: určité změně na vstupu odpovídá určitá změna na výstupu
- I – integrační: určité změně na vstupu odpovídá určitá rychlost na výstupu
- D – derivační: určité rychlosti změny na vstupu odpovídá určitá poloha regulačního orgánu
Tyto 3 principy se kombinují. Nalezení jejich optimálních poměrů pro daný případ je klíčem k úspěšné aplikaci PID regulace. U regulátorů je každá složka je zastoupena jedním parametrem:
- P – Pásmo proporcionality
- I – Integrační čas
- D – Derivační čas
V čem se udávají PID parametry ?
U regulátorů Dixell se PID parametry uvádějí vždy absolutně – ve fyzikálních jednotkách. To znamená:
- Pásmo proporcionality (Pb) : v jednotkách veličiny , která se reguluje , např. °C
- Integrační čas (It) : v sekundách
- Derivační čas: (dEr): v sekundách
Někteří výrobci uvádějí tyto parametry relativně – jako bezrozměrné koeficienty vztažené k nějaké referenční hodnotě. Výhodou vyjádření ve fyzikálních jednotkách je snadná interpretace pásma proporcionality.
Příklad PID regulace:
Ohřev na žádanou hodnotu 200°C, Pb=20 °C (pásmo proporcionality leží obvykle pod žádanou hodnotou, čas cyklu výstupu tcr1=10 sekund.
Do 180°C je topení trvale sepnuto. Nad 180°C se začne střídavě vypínat a zapínat. Zapnutí a vypnutí je úměrné regulační odchylce. Např. při 185°C (čtvrtina pásma proporcionality) je poměr zapnutí /vypnutí roven 3:1, což znamená, že z doby tcr1 (10 sekund) se výstup zapne na 7,5 sekund a 2,5 sekundy vypne (viz tabulka)
| Teplota °C | Zapnuto (s) | Vypnuto (s) |
| 180 | 10 | 0 |
| 185 | 7,5 | 2,5 |
| 190 | 5 | 5 |
| 195 | 2,5 | 7,5 |
| 200 | 0 | 10 |
Jak je to se spojitostí signálů v PID regulaci ?
Proč má PID regulátor také výstup relé , podobně jako ON/OFF regulátor a ne vždy spojitý výstup, např. 0-10V ?
Základní matematický popis PID algoritmu pracuje se spojitými signály (tj. v čase se plynule měnícími) . Spojitá regulace se používá např. u pneumatických nebo hydraulických regulátorů. Některé mechanické příklady spojité regulace jsou obecně známé (např. plovákový mechanismus regulace vody v nádrži je typickým příkladem spojitého proporcionálního regulátoru )
Pro číslicové regulátory se používá matematická idealizace , kdy se vše převede na diskrétní (nespojitý) model. Výstupním signálem z regulátoru je pak po částech spojitý signál (jeho časový průběh jsou typické „schody“ ). Technická realizace je pak různá –signál může být:
- spojitý (např. proměnné napětí 0-10V ss ) – Toto lépe odpovídá představě o PID regulaci, protože základní teorie pracuje se spojitým modelem
- nespojitý (např. kontakt relé) – Teoreticky vypočítaný signál se vhodným vzorkováním převede na pulzy. Protože zařízení produkující pulzy jsou technicky dobře realizovatelná, je to častý případ a hovoří ze také o impulzních měřicích a regulačních zařízeních.
Zatímco měřítkem velikosti signálu u spojitého výstupu PID regulátoru je jeho absolutní hodnota, u regulátorů s nespojitým signálem je to délka trvání a četnost pulzů. U regulátorů Tecnologic se dá četnost pulzů ovlivnit též nastavením doby cyklu výstupu, kterou si regulátor rozdělí na dobu, kdy bude výstup zapnut a vypnut. Nastavení se provádí parametry tcr1 pro první PID výstup, případně tcr2 pro 2. výstup . Časy se zadávají v sekundách.
Jak se v praxi projeví PID regulace topného tělesa, jaký je rozdíl oproti ON/OFF regulaci ?
U správně vyladěného regulačního obvodu se rozdíl ON/OFF a PID regulace projeví ve větší přesnosti PID regulace (na tom, s jakými odchylkami udržuje regulátor nastavenou teplotu ). ON/OFF regulátor vypíná topení až při dosažení žádané hodnoty, nutně tedy musí dojít k překmitu teploty vlivem tepelné setrvačnosti. Velmi orientačně se dá říci, že správně vyladěný PID regulátor vypíná topení ještě před dosažením žádané hodnoty, případně postupně v časových cyklech vypíná a zapíná topení, takže překmit přes žádanou hodnotu, pokud existuje, je minimální. Pozor – nelze paušálně předem určit možné odchylky, závisí to na mimo jiné na povaze regulované soustavy (zahrnuje např. tepelnou setrvačnost), nastavení PID regulátoru a poruchách regulované soustavy. Typický průběh regulované veličiny při optimální PID regulaci ukazuje obrázek.
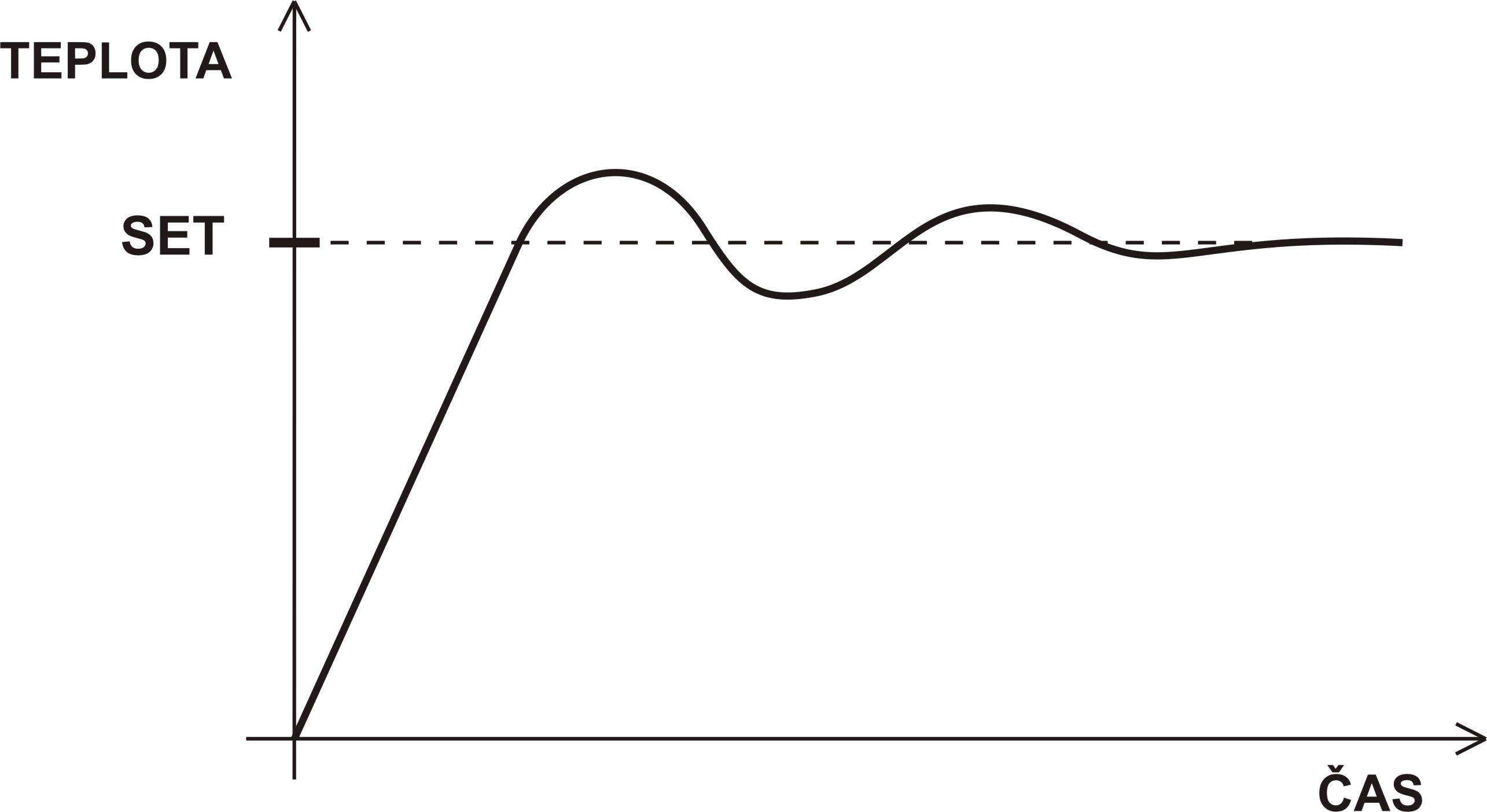
Průběh PID regulace
Co je FUZZY řízení ?
Velmi stručně se dá říci, že fuzzy logika je nástroj k matematickému vyjádření vágně formulovaných pojmů jako „hodně“, „málo“, „trochu“ apod. Umožňuje vyjádřit tzv. částečnou příslušnost k množině. Na základě této teorie se pak v řízení přiřazuje každé vstupní hodnotě jeden stav výstupu z množiny možných výstupních stavů.
V praxi se ukázalo, že tento způsob řízení je vhodný pro řadu reálných rozhodovacích úloh. Např. v regulaci teploty se obvykle používá tento způsob jako doplňkový k PID regulaci v nejbližším okolí žádané hodnoty.
Kdy použít ON/OFF a kdy PID regulaci?
Pro kvalifikované rozhodnutí je ideální znát parametry regulované soustavy, ideálně její přechodovou charakteristiku ( reakce soustavy na skokovou změnu poruchové veličiny).
Praxe je často bohužel jiná, proto na základě našich zkušeností jmenujeme některé aplikace, kde většinou postačí ON/OFF regulace:
- ohřev vody v bojleru
- nahřívání oleje u pracovních strojů
- regulace hladiny v nádrži (řízení napouštěcích a vypouštěcích ventilů a čerpadel )
- protimrazová ochrana
- chovatelské aplikace – líhně, terária, akvária apod.
- signalizace a hlášení prahových a alarmových stavů (Tam je to přímo nutnost. Není to regulace, ale pro úplnost uvádíme, používá se též ON/OFF regulátor)
- tam, kde byl doposud mechanický termostat
Kde naopak doporučujeme použít raději PID regulátor?
- vyhřívání forem
- řízení teploty trysek u extrudéru
- ostatní plastikářské technologie
- regulace teploty lišty na svařování fólií
- regulace teploty pecí
Na základě našich praktických zkušeností s laděním PID soustav doporučujeme PID regulaci všude tam kde je požadavek na přesné udržování teploty v řádu desetin stupňů až cca 3°C.
Podpůrným argumentem pro tuto volbu je skutečnost, že u regulátorů pro vyšší teploty nad 150°C není velký cenový rozdíl mezi ON/OFF a PID regulátorem. V případě potřeby se dá PID funkce vypnout a pracovat v ON/OFF režimu).
Kdy vždy použít PID regulaci?
PID regulaci je nutno použít vždy pro řízení servopohonu .
Typické příklady:
- regulace teploty TUV ovládáním směšovacího ventilu
- regulace tlaku páry ovládáním směšovacího ventilu
- regulace teploty v potrubí ovládáním vzduchotechnické klapky
Je to dvojčinná PID regulace, též třípolohová – jeden výstup dává povel na otevření, druhý na uzavření ventilu nebo klapky. Třetí polohou se zde rozumí klid- ani jeden výstup není zapnutý.
Častý problém: “Zkoušeli jsme všechno možné, ale PID regulátor optimálně nefunguje“ (následuje obvykle výčet toho, co nefunguje)
Zde doporučujeme provést podrobnou analýzu a zaměřit se především na:
- nastavení PID parametrů
V některých studiích se uvádí, že až 70% problémů s regulací způsobuje špatné nastavení regulátorů.
- umístění vstupního čidla teploty, snímače tlaku atd…
Toto je nejčastější příčina stížností, že je regulace „pomalá“. S rostoucí vzdáleností čidla od akčního členu (např. pohonu klapky) roste i dopravní zpoždění, příliš velké dopravní zpoždění nedává šanci regulátoru přiměřeně rychle a správně reagovat.
Pokud máte problém posoudit únosnost dopravního zpoždění, doporučujeme úplně vyřadit integrační a derivační vazbu (nastavení It=0, dEr=0) a sledovat chování při ryze proporcionální regulaci. Zkoušejte postupně snižovat pásmo proporcionality (zvětšujete zesílení) Nastavte Pb např. 15, 10, 8, 5 …1 Pokud se reakce regulátoru nezlepší, je nutno přemístit vstupní čidlo blíže k akčnímu členu. - povahu procesu, který chcete regulovat
Jsou specifické soustavy, které je velmi obtížné regulovat. Velmi častým problémem je, že regulovaná veličina se chová diametrálně odlišně v závislosti na různých fázích technologického procesu ( v praxi slýcháme, že „někdy jsou její změny rychlé, jindy pomalé“) To by znamenalo pokaždé nastavit jiné PID parametry. Ideální je věnovat se této problematice již při návrhu technologie.